
The Boeing Company
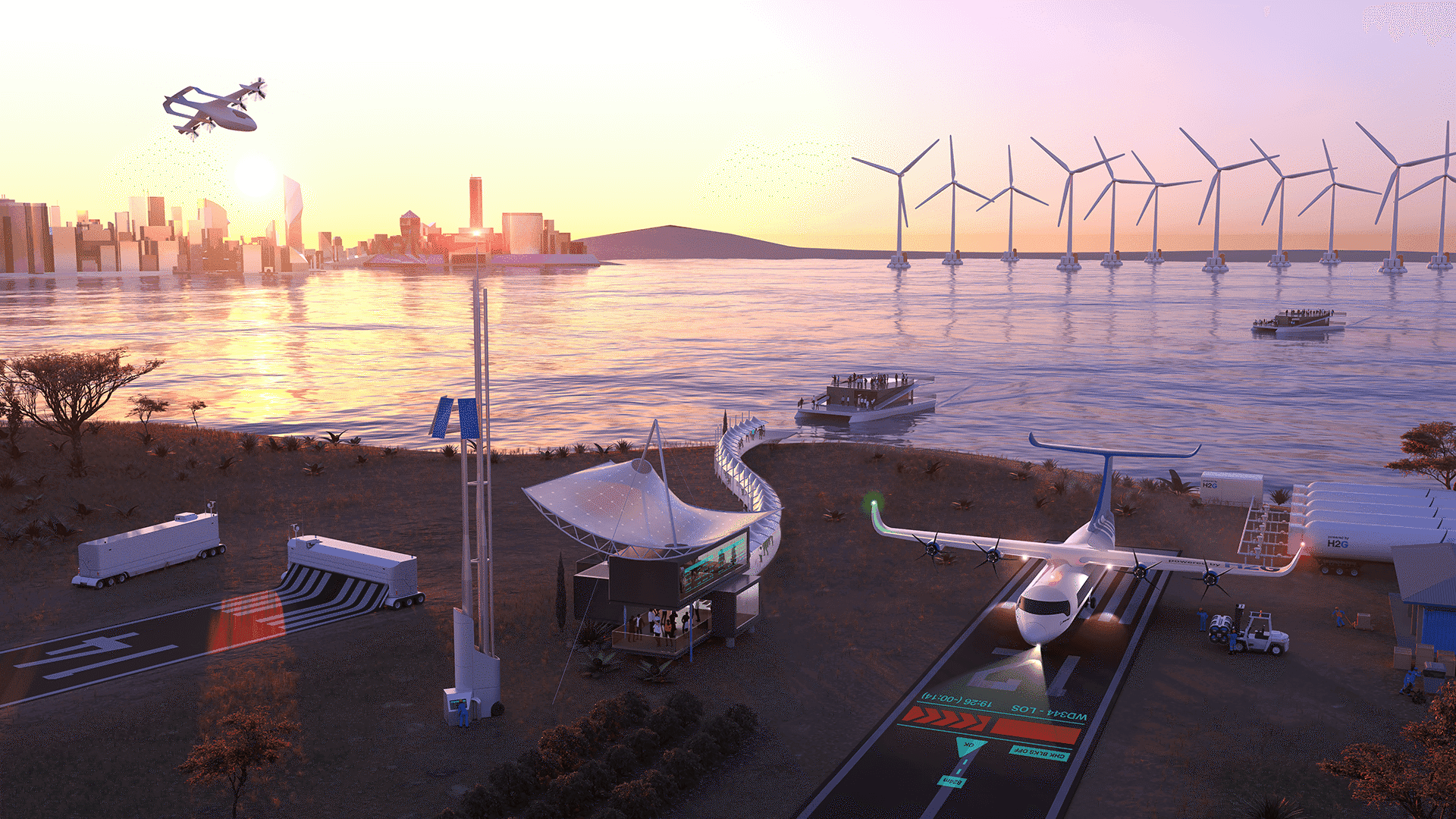
A new era of sustainable aerospace.
Lighting the path to a carbon-free future for commercial aviation.



Our clients in their own words
The quality of work Teague produces, combined with the perfect blend of grounded research and visionary design, and the professional packaging and delivery of the resulting work is everything we need in a design partner.
Anthony D. Paul
Director of Strategic Foresight | Amtrak